Calibrating Speed
The holy grail of sailboat performance comparison is to sort out how fast it goes when we know what the surrounding conditions— wind and water movement— are. It’s actually quite complicated, and I confess that I don’t have a final answer to this question, yet. This post is about one part of it, however, calibrating boat speed.
What is Boat Speed?
Boat speed — as measured — is what our Hanse’s DST800 sends out to the NMEA 2000 network based on how fast a small paddlewheel on the bottom of the boat is moving.

Since the paddlewheel spins in just one direction (aligned with where the boat is heading), it doesn’t account for sideways movement.
Now, because the paddlewheel (apparently) spins a bit differently depending on the hull shape of the boat and the location of the sensor on the hull (and the amount of gunk it has on it, and a zillion other small things), it needs to be calibrated.
Gain calibration (this post) is concerned with finding good correction values to use when the boat is not heeling. Heeling calibration (not in this post), is concerned with what happens when the boat is heeling. This is especially important for boats (like our Hanse 388), where the speed sensor is not installed exactly on the centerline.
Gain Calibration
There are a couple of standard ways of doing this (using the B&G instruments on any modern Hanse). I’ll mention them first and then head over to my own “applied” method.
SOG Reference
This is an auto calibration option that uses speed over ground (SOG) from your GPS, and compares the average of SOG against the average boat speed from the speed sensor for the duration of the calibration run.
(B&G Triton2 manual)
Basically, you drive the boat in a straight line (no wind or current allowed!). If boat speed is 6.4 knots and SOG is 6.0 knots, you enter a correction coefficient into the system. For example 6.0 SOG/6.4 BSPD = (approx) 94%. This correction will be applied linearly to all speeds.
Distance reference
Allows you to calibrate the log via a distance reference. You will need to complete consecutive runs, under power at a constant speed made along a given course and distance. (B&G manual)
(B&G Triton2 manual)
This is a more exact method, where you drive back and forth a track (with a predetermined distance) and let the B&G computer determine the difference between actual speed ([track length / time]) and what the sensor thinks it was.
The B&G manual doesn’t mention the end result, so I’m not sure whether it will in fact build a correction table (with several speed-correction values), or end up with just one linear correction value, like the SOG Reference method does.
If you want to read a lot more about this method, however, and how it is used on much bigger boats (sometimes called ships), here’s a really interesting paper: Measured Mile Calibration (credits for finding it over on Cruisers Forum).
“My Method”
Well, I’m sure this is not my method, but here’s what I did:
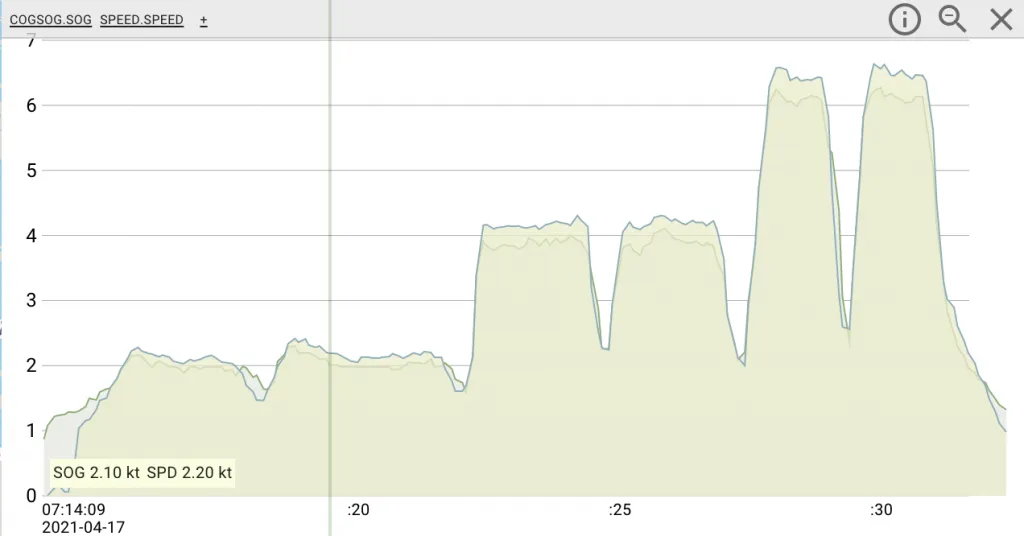
First, with very little wind and (almost no) current, I drove back and forth for short distances. First at about 2 knots SOG, then about 4 knots SOG, and finally about 6 knots SOG.
Here’s the data from that, and you immediately notice that the speed in water was slightly above SOG all the way.
Then, I calculated the averages for the combined runs and made a table like this:
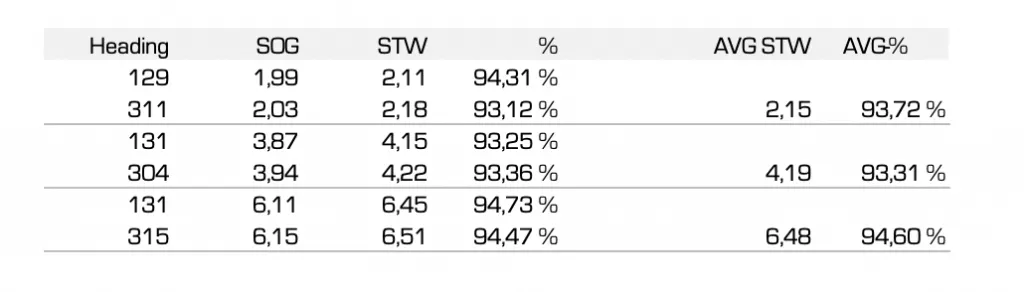
So, for example, during the “2 knots” run, I actually averaged 2.15 knots boat speed. And— on average— SOG was showing 93.72% of that.
Finally, I put the averages into a graph and had Excel create a polynomial function:
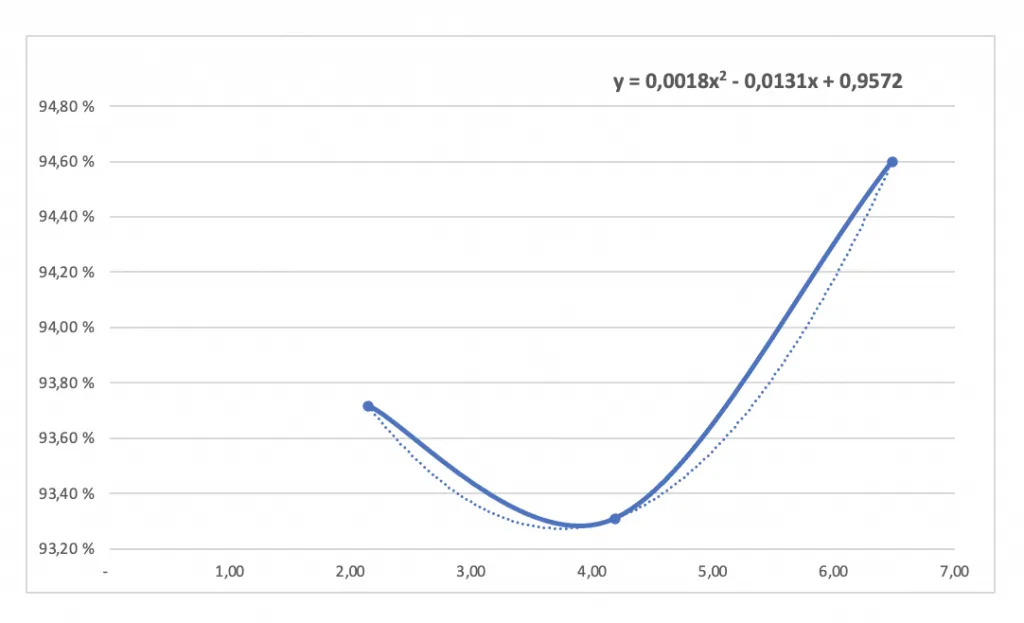
Now, there was a dip there, for some reason. If my measurements were correct, the boat speed was a bit less off at 2 knots and 6 knots than at 4 knots. A mystery! 🤷♂️
I took another look at the data.
This time using a bit more resolution, and trying to select only parts with very little change in either heading or speed.
End result: the dip disappeared and I got a linear trendline!
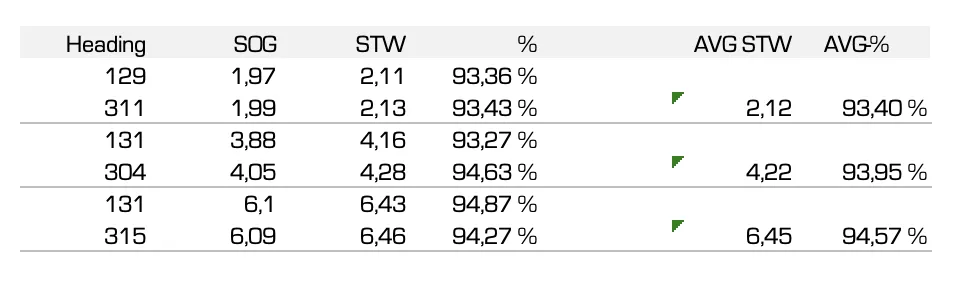
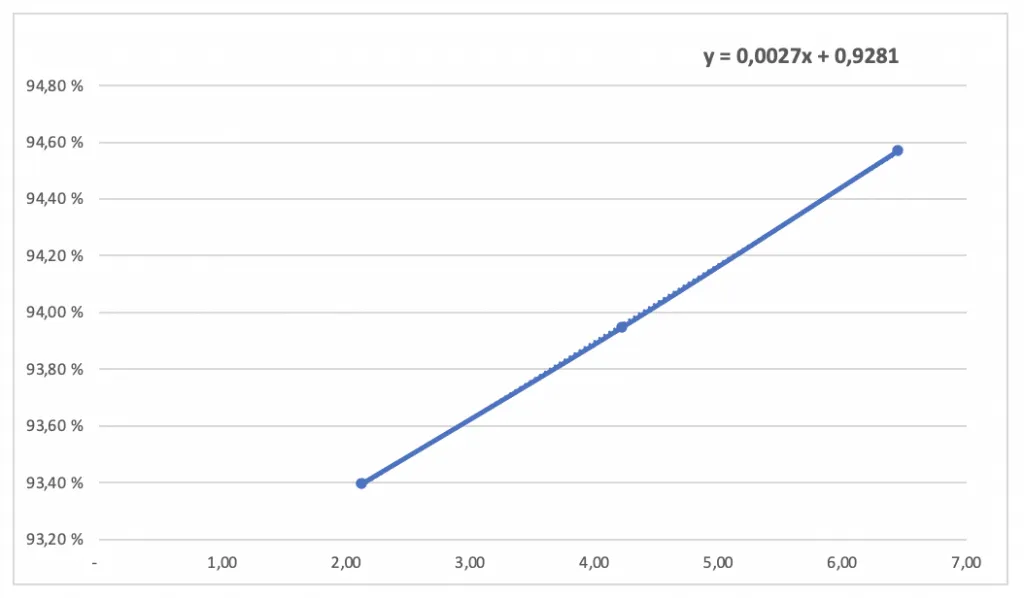
It seemed more intuitive that this was the more accurate correction function.
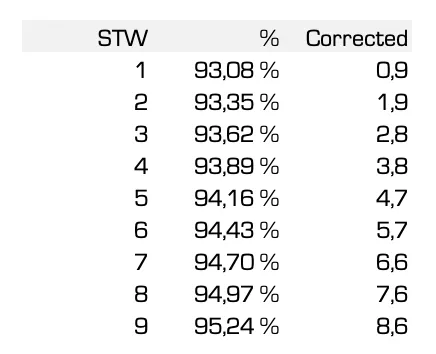
Here is a correction table with some extrapolations to both slower and faster speeds.
What’s Next
I can’t input my linear function into the B&G instrument, so my next task on the to-do list is to put it into my onboard Raspberry PI.
With that, and with all the other parameters (pitch, roll, etc), I might be able to output my own version of boat speed to the NMEA 2000 network and cross my fingers that it is at least equally, if not more accurate than the B&G Triton2 version.
Who knows, but at least it will be fun to try 😌🤞
P.S. B&G is obviously a few (hundred) steps ahead of me. The off-the-shelf products incorporating all of these and much more are their H5000 and WTP3 systems. For me, those are not an option, though, since the task I’ve given to myself is to get the most out of what we have. A beautiful Hanse 388 with just factory installed options, a Raspberry PI, and a substantial amount of creative coding energy 😃